
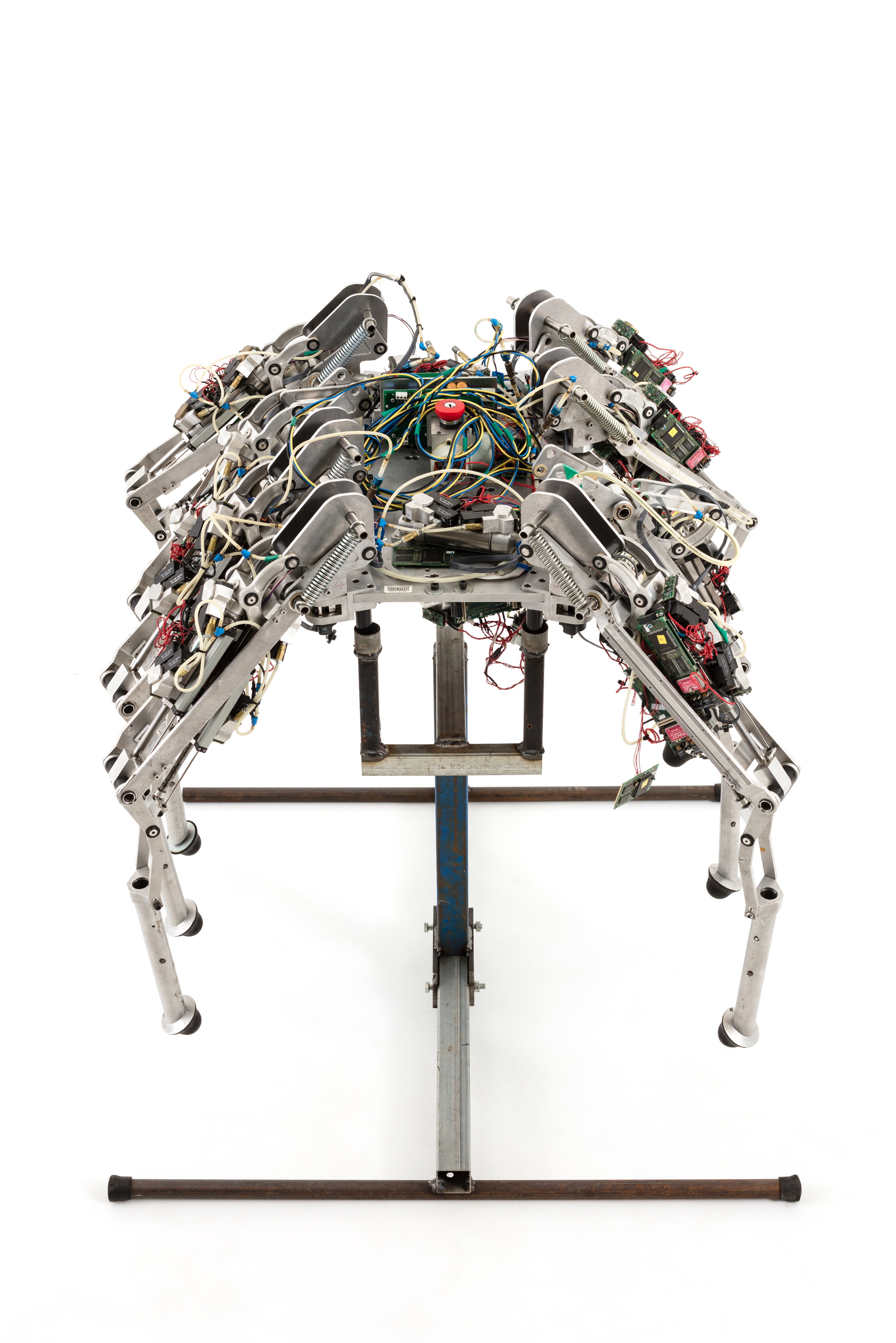



Robug IV prototype walking robot
Object No. 2012/18/1
John Billingsley, the Professor of Robotics at the University of Southern Queensland, began his career as a mathematician in Portsmouth in the United Kingdom. He developed auto-pilots for the aeronautical industry, and then went on to study control theory. He saw that the best way to apply control theory was via robotics. Professor Billingsley has developed many robots at the University of Southern Queensland, and advanced Australia's standing in the area of Robotics. Robotics is a field of mechanical automation and computing that has fascinated scientists and the general public alike since the sixteenth century, when Jacques de Vaucanson developed a group of complex automata in France. It is an area of technology that has become as much a part of popular culture as it has of industry. Robug IV captures the imagination with its innovative use, commercial potential and interesting design. The idea of using an animal's anatomy and movement and applying it to machines is not new. Hargrave did just that in the late 19th century with his designs for human flight. However, the concept is again being seriously considered and used to solve the issues of mobility for robots. In this case the way a spider can effortlessly climb a vertical surface has been emulated mechanically and electronically. Professor Billingsley and his team at the University of Southern Queensland have also developed a toad robot designed to move and climb much the same way as a toad does in nature. The object represents a stage in robotics that has advanced from programming and mechanically automating robots to developing relatively independent thinking and moving robots - such as Honda's Asimo robot. Damian McDonald August 2011
Loading...
Summary
Object Statement
Prototype walking robot and mount, Robug IV, aluminium / plastic / electronic components / rubber, designed at University of Portsmouth, Hampshire, England / Department of Mechatronics, University of Southern Queensland, Australia, made by Department of Mechatronics, University of Southern Queensland, Australia,1995-1999
Physical Description
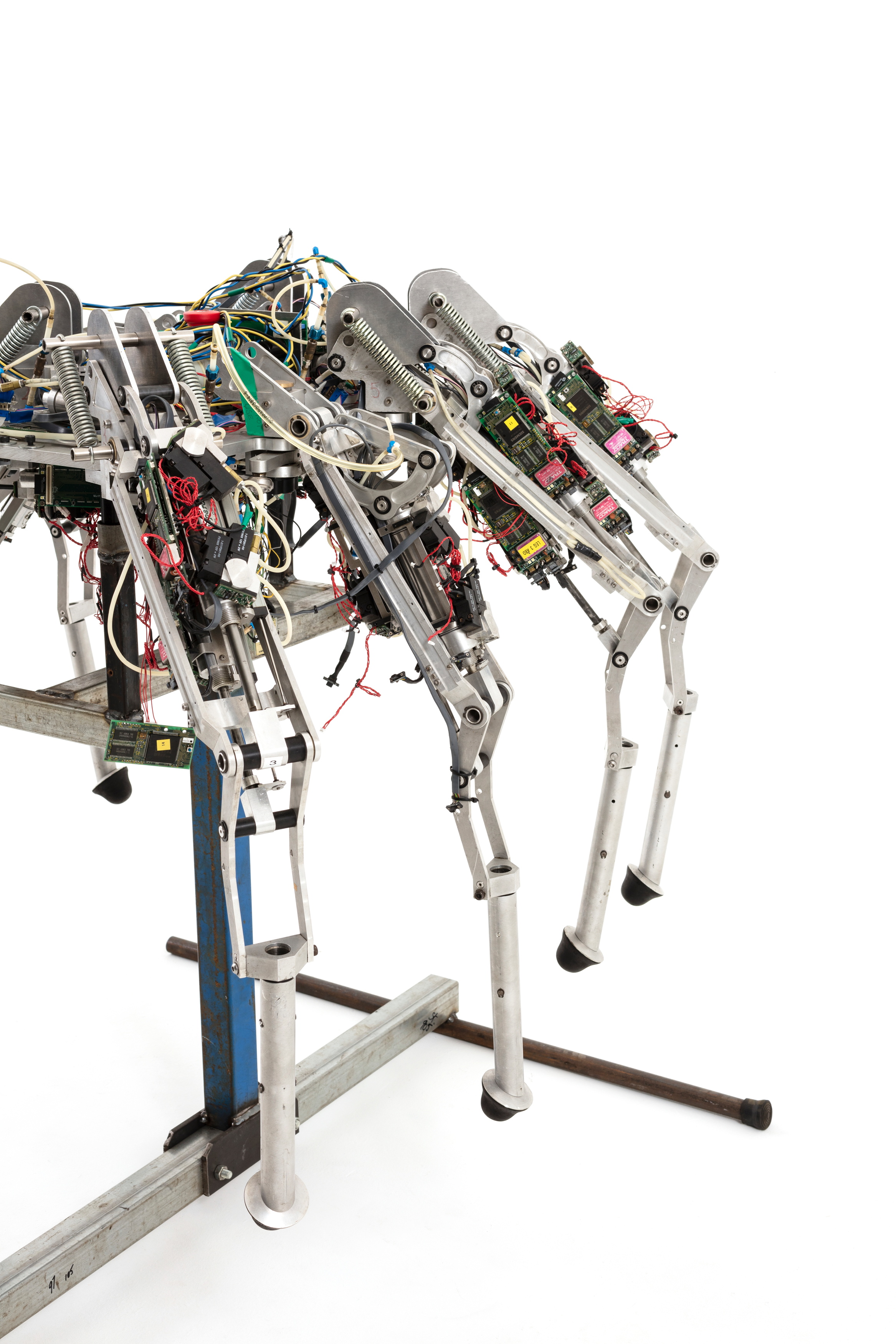
The robot is of aluminium construction, with a rectangular plate as the body, and eight (four on each side) legs which are articulated at four joints, and a swivel joint at the body. Electronic wiring and pneumatic motors are attached to each leg and the body. The robot is supported by a metal stand.
DIMENSIONS
Height
1150 mm
Width
1020 mm
Depth
1100 mm
Weight
55 kg
PRODUCTION
Notes
The Robug IV robot was designed and developed by Professor John Billingsley's team at Portsmouth University and Portsmouth Technology Consultants Ltd (Portech, a company Billingsley helped found in the United Kingdom), with a very substantial grant from the European Community. Its concept was led by the late Arthur Collie. It was then further researched in Australia by Professor Billingsley and his doctoral students at the University of Southern Queensland. Professor Billingsley's team and company had designed robots called NEROs (Nuclear Electric Robots) that could climb vertical surfaces in order to access highly hostile and inaccessible environments in nuclear reactors. Robug IV was developed for potential application in the areas of security, cleaning, surveillance, and assessing and repairing inaccessible areas of construction and engineering. Robug IV, as the name suggests, is the fourth generation of a series of projects in which specific robot mobility was the primary aim. The first Robug, developed in the United Kingdom at Portsmouth Polytechnic, where Professor Billingsley was developing robots in the mid 1980s, was a coffin-shaped, six-legged robot that taught Professor Billingsley's team much about the load and number of legs a walking robot should have. Although Robug I had six legs, it suffered severe weight problems. Robug II was of a much lighter design and climbed with only four legs, using a design where the body of the robot was lower than the knees - much like many insects in nature. On moving to Australia, Professor Billingsley and his team then developed the Toad wall climbing robot - one of which, Toad III, is in the Powerhouse Museum collection. This could ascend sheer surfaces, and walk on ceilings.
HISTORY
Notes
Robug IV was designed and developed with substantial European funding at Portsmouth University and Portsmouth Technology Consultants Ltd (Portech). This robot has eight legs, twenty-four processors - three for each leg - and greatly improved mobility and standing strength. However, the interest in such robots began to dry up, and when Professor Billingsley moved to Australia, and began work at the University of Southern Queensland, Robug IV was purchased by the University for further research.
SOURCE
Credit Line
Gift of the University of Southern Queensland, 2012
Acquisition Date
24 February 2012

Copyright for the above image is held by the Powerhouse and may be subject to third-party copyright restrictions. Please submit an Image Licensing Enquiry for information regarding reproduction, copyright and fees. Text is released under Attribution-Non Commercial-No Derivative licence.
Image Licensing Enquiry
Object Enquiry