





'Robocow' robotic cow
Object No. 2008/52/1
This is a battery-operated robotic cow, called 'Robocow', developed in Australia at the National Centre for Engineering in Agriculture in Toowoomba, Queensland, in the late 1990s to help train cutting horses. The impetus for robocow came when John Billingsley, the Professor of Robotics at the University of Southern Queensland, was asked to design a robot that could train horses to work with cattle. This is usually done with calves, but the calves soon tired of running and dodging the horses. One advantage of using robots is that they will engage in repetitive work without tiring or becoming bored. To engage the horse's attention, the robot had to look and move like a calf. The robot's motor, wheels, and steering mechanism enabled it to mimic the jerky, sudden movements of a young cow. Professor Billingsley began his career as a mathematician in Portsmouth, England. He developed auto pilots for the aeronautical industry, and then went on to study control theory. He saw that the best way to apply control theory was to robotics. Professor Billingsley has developed many robots at the University of Southern Queensland, and advanced Australia's standing in the area of Robotics. Robotics is a field of mechanical automation and computing that has fascinated scientists and the general public alike since the sixteenth century when the first automata were developed by Jacques de Vaucanson in France. It is an area of technology that has become as much a part of popular culture as it has of industry. Robocow captures the imagination with its innovative use and interesting design. This object was offered to the Museum by the National Centre for Engineering in Agriculture at the University of Southern Queensland in 1999 for the 'Universal Machine' exhibition. Robocow features in a video that was part of the exhibition (later titled 'Cyberworlds'). The object represents a stage in robotics that has advanced from programming and mechanically automating robots to relatively independent thinking and moving robots - such as Honda's Asimo robot. Damian McDonald October 2007
Loading...
Summary
Object Statement
'Robocow' robot, metal / plastic / fabric / electronic components, battery operated, designed and made by the National Centre for Engineering in Agriculture, Toowoomba, Queensland, Australia, 1995-1999, used to train horses to work with cattle
Physical Description
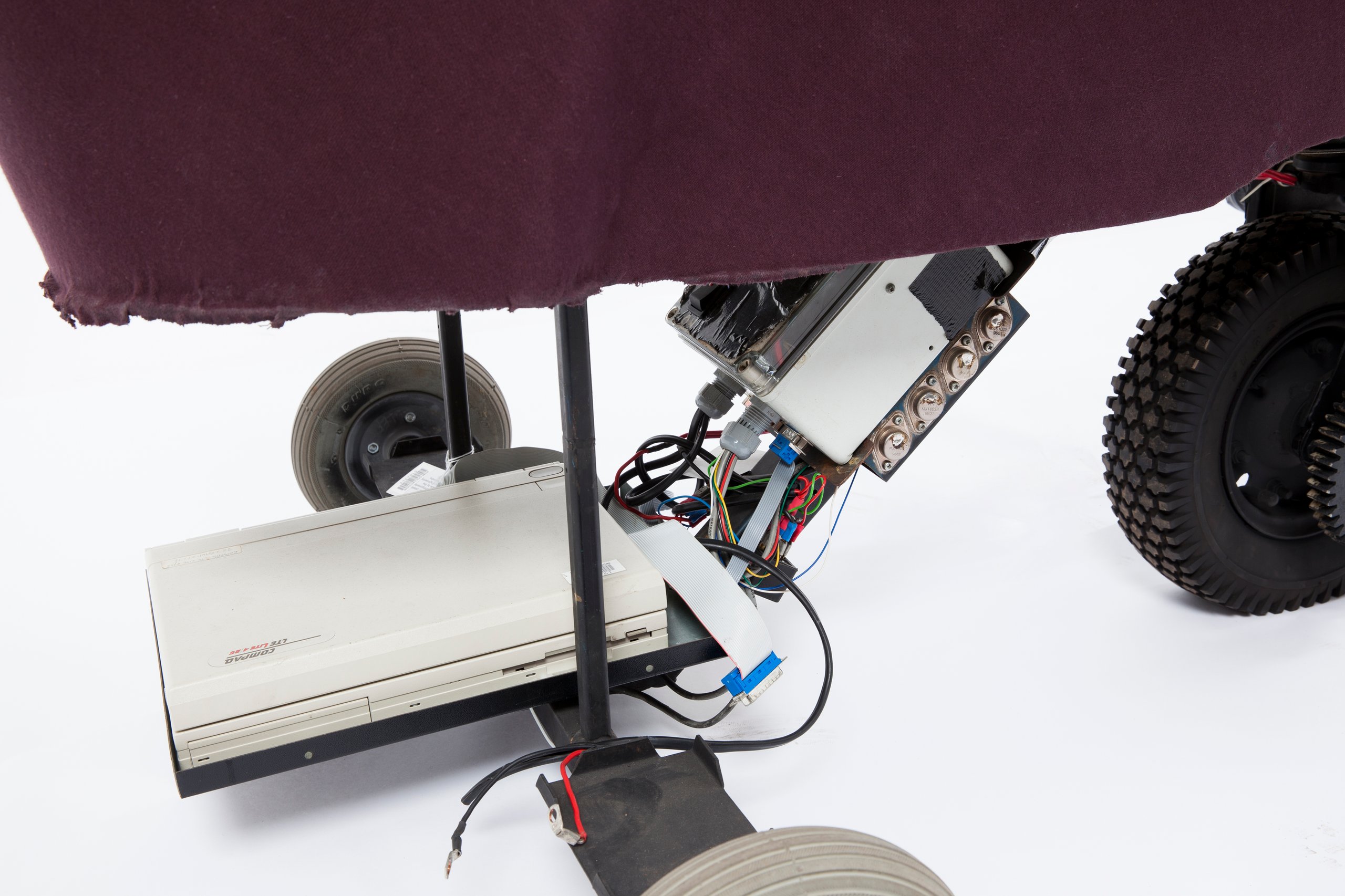
Mobile device designed for training cutting horses to work with cattle. A cutting horse is used to separate a calf from a cow when a procedure is required to be performed on either cow or calf. Robocow is programmable and has been designed to closely resemble a cow. It has two wheels at the rear for stabilization, and one at the front for steering that can swivel 90 degrees. The top of the robocow is covered in moulded Styrofoam and brown fabric to resemble a cow's torso, and the front of the material has been fashioned to resemble a cow's head. It is powered by two motors - one to drive it, and one for the steering. Programming is done via a laptop computer which connects to the robocow's hard drive memory by serial port. The power source is a single battery.
DIMENSIONS
Height
1070 mm
Width
820 mm
PRODUCTION
Notes
Robocow was designed and assembled at the University of Southern Queensland, and tested at Stanthorpe, Queensland, Australia in 1995-1999. Professor John Billingsley of the University of Southern Queensland began work on the Robocow when he was asked to design a device for training cutting horses. A joint venture between the University and the National Centre for Engineering in Agriculture saw research begin on the robocow project. Professor Billingsley provided the robotic technology required while the National Centre for Engineering in Agriculture team worked on what the program would have to perform in order to be effective in training horses. The design is simple but robust. Mobility is provided by a set up much like a child's tricycle: two wheels at the rear which provide motivation, driven by an electric motor, and one wheel at the front for steering, driven by a second motor. The frame had to be strong enough to withstand rough ground, as well as be able to stop, turn, and accelerate suddenly - much like the movements of a live calf.
HISTORY
Notes
This particular example of the robocow was made for the 'Universal Machine' exhibition and public programs in 1999. It is in full working order and can be programmed to carry out the tasks it was designed for.
SOURCE
Credit Line
Gift of the University of Southern Queensland, National Centre for Engineering in Agriculture, 2008
Acquisition Date
14 March 2008

Copyright for the above image is held by the Powerhouse and may be subject to third-party copyright restrictions. Please submit an Image Licensing Enquiry for information regarding reproduction, copyright and fees. Text is released under Attribution-Non Commercial-No Derivative licence.
Image Licensing Enquiry
Object Enquiry