
Automated wool harvesting system
Object No. 92/1846
The automated wool harvesting system was a major Australian innovation in the fields of computing and agricultural engineering. The robots used a unique electrical feedback system to successfully remove the fleece from a living animal without harm. They used sensor-based real-time adaptive positional control that allowed the shearing robots to reprogram themselves as they followed the curves of an animal within fixed reference points. The principal behind the team's approach was to create a theoretical model of the contours of the sheep's body by determining the relationship between three points of bare skin on which sensors could be targeted: the nose, tail and the brisket. The technology was described as 'space technology, based on a point in space between these coordinates.' At the time it was created in the 1980s, the robotic system was one of the most sophisticated in the world. It was adaptable to sheep that differed in breed, conformation, size and shape, and reduced sheep mortality rates resulting from shearing. The system was designed to reduce costs for farmers and to overcome the problem of the shortage of skilled shearers. It also reduced strain on shearers' backs by minimising the need to bend over sheep. It produced a superior wool clip, too, by keeping the fleece and the belly wools separate.
Loading...
Summary
Object Statement
Wool harvesting system, production prototype and robotic shearer, wood/metal/rubber/fibreglass, Merino Wool Harvesting Pty Ltd, Australia, 1987-1992
Physical Description
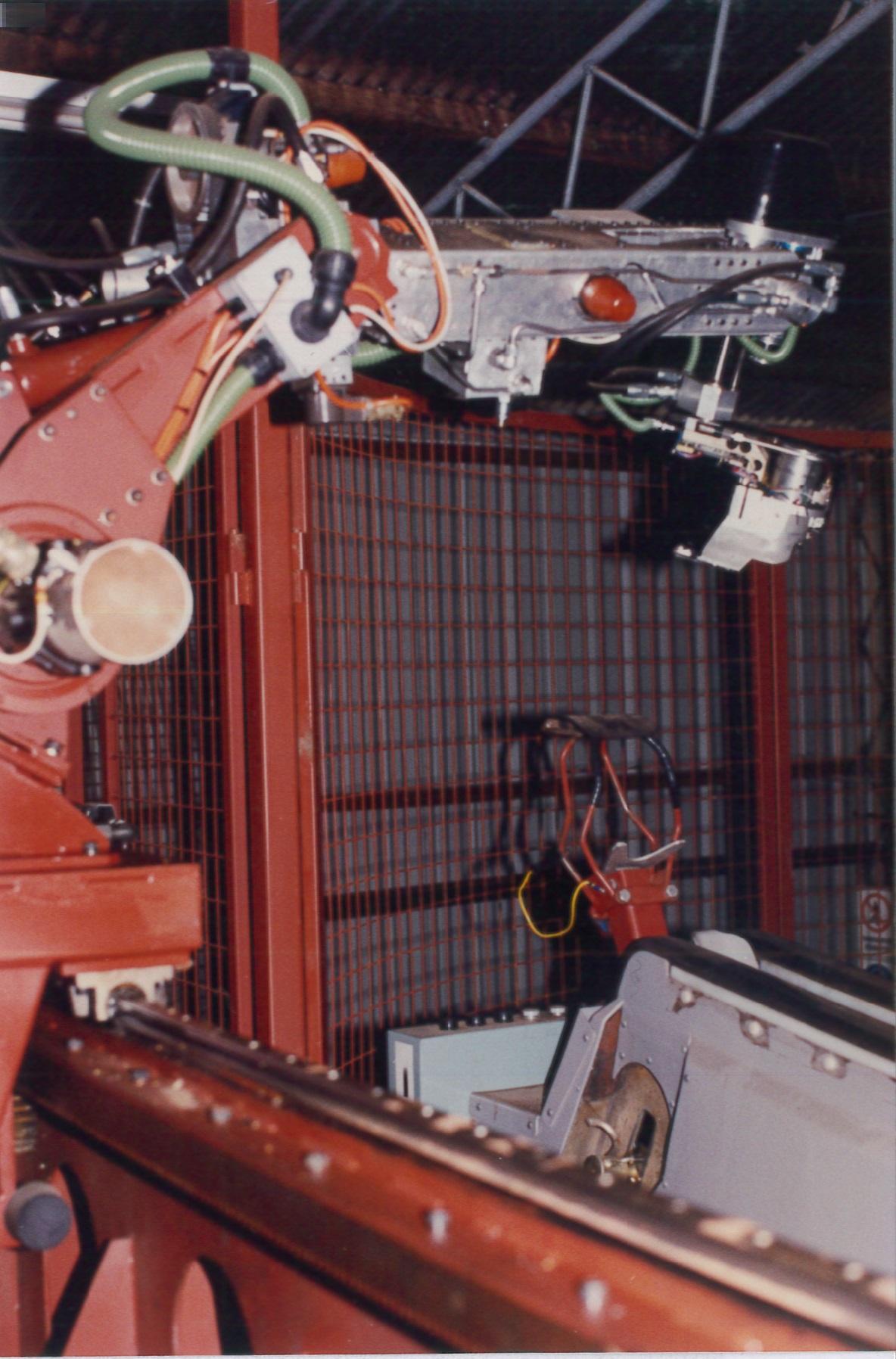
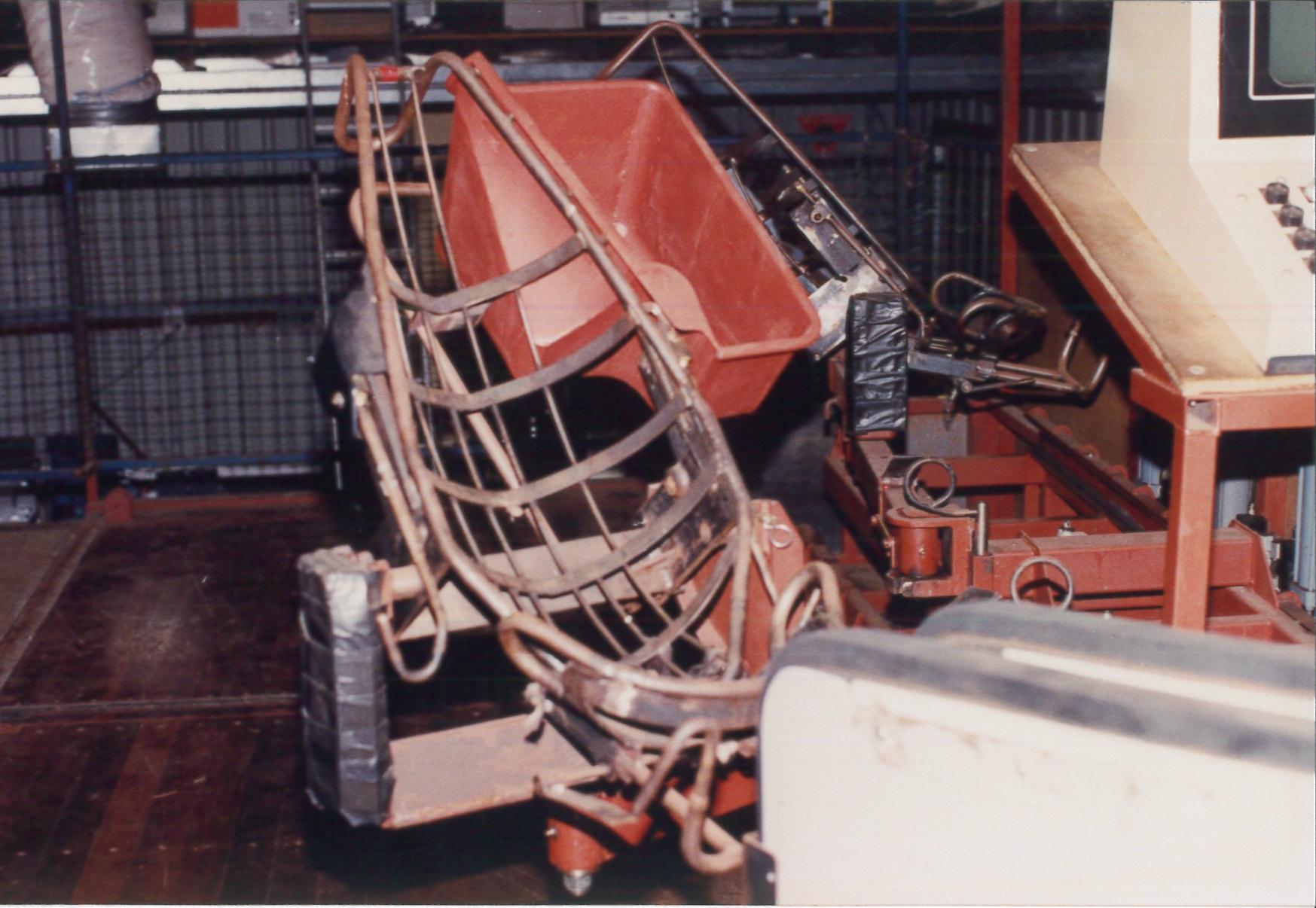
Wool harvesting system, production prototype and robotic shearer, wood/metal/rubber/fibreglass, Merino Wool Harvesting Pty Ltd, Australia, 1987-1992. Consists of single axle semi-trailer with the following fixed: 2 robotic shearing arms; 2 sheep shuttles; 2 sheep chairs; 2 manual sheep shearing stations; 2 wool presses; computing & hydraulic systems. There is a safety grille which encloses the robotic arms, but it has been dismantled from the semi-trailer. 6 circuit boards. 5 keys. The Wool Harvesting System is a complete 'factory' for removing wool from sheep. It is mounted on a trailer that is designed to be towed by a prime mover to sit beside a shearing shed. A floor on the trailer folds out to increase the size of the floor when set up. A ramp/race leads sheep from yards or holding pens to a capture point. Each sheep is led to and lifted onto to a holder where it is restrained by a mild electric current. Here the fleece is shorn from the sheep by two robot arms and caught by a steel tray, then collected for classing. The partly shorn sheep is then flipped onto its back to leave it 'sitting' in a steel cradle. At this point the wig, belly wool and legs are shorn by a human shearer. A multi-box press with a single monkey is mounted at the side of the trailer, near the shearers, so wool is delivered straight to the press with no contamination from dirt or trimmings lying on the floor. The shorn sheep are released at the other end of the harvester. The unit is computer-operated and caries its own powerful electric generator. The robotic arms are shielded for safety when in operation.
PRODUCTION
Notes
The machine was created by Australian Merino Wool Harvesting, although the company went into liquidation in 1992. The harvester is the culmination of a 20 year effort to automate the shearing process. In 1987, Elders provided $7 million to develop the Automated Wool Harvesting System production prototype. The prototype was completed in 1990. Merino Wool Harvesting needed another $6 million to commercialise the harvester but Elders was in severe financial difficulties. Funding could not be raised so the company went into voluntary liquidation in June 1992. This is a production prototype.
HISTORY
Notes
The unit was conceived by Lance Lines, a chemical engineer (turned farmer) who played a leading role in the development of the Ballarat Gun Cotton Factory during World War II. He believed strongly in the technological development of farms and believed that a farmer should invest in a wool harvesting machine as readily as he invested in a grain harvesting one. He saw that automation of wool harvesting was important because shearing typically consumed 25 to 30% of a woolgrower's income. In 1991 he stated that his objective regarding automated shearing was not to build a robot to shear sheep, but ' to develop a wool harvesting system that was more efficient than current methods. One part of that system was a robot.' It had to work well in the Australian bush and be something that the industry would use. Lines was adept at bringing different interest groups together, accessing capital from a wide range of sources and in attracting innovative and technically skilled workers. The project was funded by a private firm, Elder Smith, and by the Wool Corporation from wool grower funds. The Wool Corporation also funded a rival project proposed by a Western Australian engineering institution. In the early 1970s, John Baxter, a scientist working at Weapons Research in Adelaide told Lines that if he could keep a sheep still scientists could cut the wool off. A group of scientists formed an organisation called SENCON and worked on the project on a voluntary basis. The scientists were John Baxter (chemist), Gordon Heliwell (mechanical engineer), Jim Mapletoft (electronic engineer) and Noel Brown (physicist). A study done by EMI (which was focussed on engineering rather than music in those days) in 1975/76 indicated that the project would work. They created the Stock Still immobiliser which applies a small electric current that immobilises an animal. Australian Merino Wool Harvesters Ltd (AMWH) was founded in 1976. They consulted with Joseph Engelberger (Mr Robot) in USA. Dr Chris Abell from the University of Adelaide became a consultant and created the first robot that demonstrated the principal to Elder Smith and the Wool Corporation. Elder Smith gave AMWH a grant of $5.4 million after they had shorn the side of a sheep in 30 seconds. The project moved from the research phase to the the production engineering phase and a whole new team of people was hired in 1987. These included Rod Smith (general manager), Malcolm McInnes (mechanical engineer), Russell Meade (sheep and wool specialist), Ben Baek (engineer), Tony Ryan (shearer), David Boschma, Kevin Rogers, Joanne Fisher and Pat Christie (Managing director). By 1991 the team had created the Mark 1 prototype, the world's most sophisticated agricultural robot, just in time for a major financial recession. Despite the success of the production prototype, and completion of all project commitments, Elders discontinued its financial backing and the project could not attract further funding. The company was liquidated in 1992 and all of the company's assets were auctioned on 24 June 1992. The Museum purchased the Mark 1 prototype.
SOURCE
Credit Line
Purchased 1992
Acquisition Date
2 October 1992

Copyright for the above image is held by the Powerhouse and may be subject to third-party copyright restrictions. Please submit an Image Licensing Enquiry for information regarding reproduction, copyright and fees. Text is released under Attribution-Non Commercial-No Derivative licence.
Image Licensing Enquiry
Object Enquiry